How to Install
Bazel is an open-source build and test tool similar to Make, Maven, and Gradle. It uses a human-readable, high-level build language. Bazel supports projects in multiple languages and builds outputs for multiple platforms. Bazel supports large codebases across multiple repositories, and large numbers of users.
support language and platform:
- c++
- java
- android
- ios
Using binary installer
sudo apt-get install pkg-config zip g++ zlib1g-dev unzip python
#download `bazel-0.16.1-installer-linux-x86_64.sh` from `https://github.com/bazelbuild/bazel/releases`
chmod +x bazel-0.16.1-installer-linux-x86_64.sh
./bazel-0.16.1-installer-linux-x86_64.sh --user
# The --user flag installs Bazel to the $HOME/bin directory on your system and sets the .bazelrc path to $HOME/.bazelrc.
vim .bashrc
export PATH="$PATH:$HOME/bin"
Using Bazel custom APT repository
unable to access
googleapis.com
sudo apt-get install openjdk-8-jdk
echo "deb [arch=amd64] http://storage.googleapis.com/bazel-apt stable jdk1.8" | sudo tee /etc/apt/sources.list.d/bazel.list
curl https://bazel.build/bazel-release.pub.gpg | sudo apt-key add -
sudo apt-get update && sudo apt-get install bazel
sudo apt-get upgrade bazel
Tutorial
get examples
git clone https://github.com/bazelbuild/examples/
folder structure
cpp-tutorial/
├── README.md
├── stage1
│ ├── main
│ │ ├── BUILD
│ │ └── hello-world.cc
│ ├── README.md
│ └── WORKSPACE
├── stage2
│ ├── main
│ │ ├── BUILD
│ │ ├── hello-greet.cc
│ │ ├── hello-greet.h
│ │ └── hello-world.cc
│ ├── README.md
│ └── WORKSPACE
└── stage3
├── lib
│ ├── BUILD
│ ├── hello-time.cc
│ └── hello-time.h
├── main
│ ├── BUILD
│ ├── hello-greet.cc
│ ├── hello-greet.h
│ └── hello-world.cc
├── README.md
└── WORKSPACE
7 directories, 20 files
stage1
Understand the BUILD file
cpp-tutorial/stage1/main/BUILD
cc_binary(
name = "hello-world",
srcs = ["hello-world.cc"],
)
build target
cd stage1
bazel build //main:hello-world
output
INFO: Found 1 target...
Target //main:hello-world up-to-date:
bazel-bin/main/hello-world
INFO: Elapsed time: 2.267s, Critical Path: 0.25s
test binary
bazel-bin/main/hello-world
Review the dependency graph
install graphviz
sudo apt install graphviz xdot
vizualize
bazel query --nohost_deps --noimplicit_deps 'deps(//main:hello-world)' --output graph
xdot <(bazel query --nohost_deps --noimplicit_deps 'deps(//main:hello-world)' --output graph)
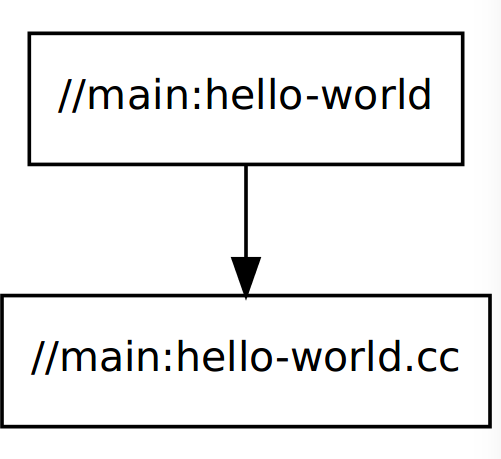
graph
stage2
Specify multiple build targets
cpp-tutorial/stage2/main/BUILD
cc_library(
name = "hello-greet",
srcs = ["hello-greet.cc"],
hdrs = ["hello-greet.h"],
)
cc_binary(
name = "hello-world",
srcs = ["hello-world.cc"],
deps = [
":hello-greet",
],
)
build target
cd stage2
bazel build //main:hello-world
output
INFO: Found 1 target...
Target //main:hello-world up-to-date:
bazel-bin/main/hello-world
INFO: Elapsed time: 2.267s, Critical Path: 0.25s
test binary
bazel-bin/main/hello-world
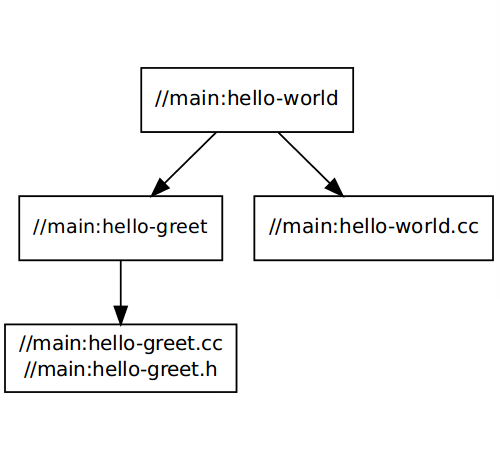
graph
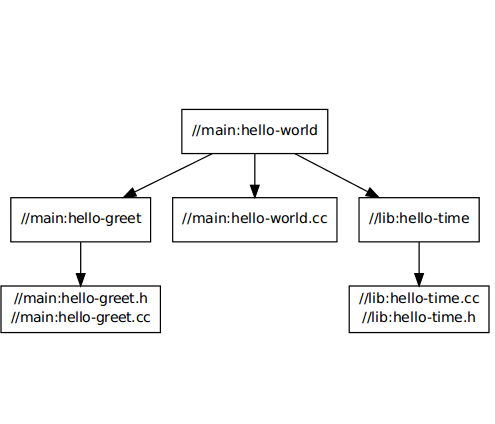
stage3
Use multiple packages
folder structure
└──stage3
├── main
│ ├── BUILD
│ ├── hello-world.cc
│ ├── hello-greet.cc
│ └── hello-greet.h
├── lib
│ ├── BUILD
│ ├── hello-time.cc
│ └── hello-time.h
└── WORKSPACE
lib/BUILD
cc_library(
name = "hello-time",
srcs = ["hello-time.cc"],
hdrs = ["hello-time.h"],
visibility = ["//main:__pkg__"],
)
This is because by default targets are only visible to other targets in the same BUILD file.
main/BUILD
cc_library(
name = "hello-greet",
srcs = ["hello-greet.cc"],
hdrs = ["hello-greet.h"],
)
cc_binary(
name = "hello-world",
srcs = ["hello-world.cc"],
deps = [
":hello-greet",
"//lib:hello-time",
],
)
build target
cd stage3
bazel build //main:hello-world
output
INFO: Found 1 target...
Target //main:hello-world up-to-date:
bazel-bin/main/hello-world
INFO: Elapsed time: 2.267s, Critical Path: 0.25s
test binary
bazel-bin/main/hello-world
graph
Use labels to reference targets
//path/to/package:target-name
- When referencing targets within the same package, you can skip the package path and just use
//:target-name. - When referencing targets within the same BUILD file, you can even skip the
//workspace root identifier and just use:target-name.
Reference
History
- 20180821: created.