Series
- Part 1:cpp cuda programming tutorial
- Part 2: cuda activation kernels
- Part 3: cublasSgemm for large matrix multiplication on gpu
Guide
introduction
在异构计算架构中,GPU与CPU通过PCIe总线连接在一起来协同工作,CPU所在位置称为为主机端(host),而GPU所在位置称为设备端(device),如下图所示。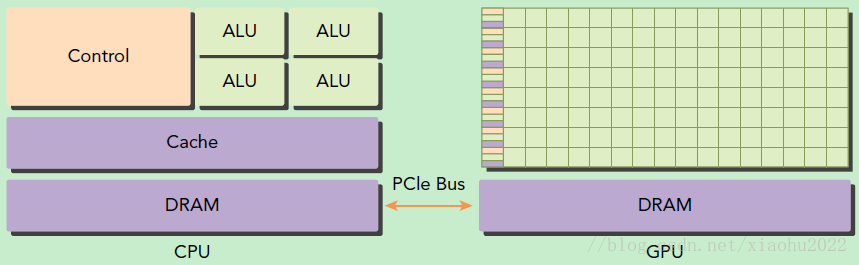
基于CPU+GPU的异构计算平台可以优势互补,CPU负责处理逻辑复杂的串行程序,而GPU重点处理数据密集型的并行计算程序,从而发挥最大功效。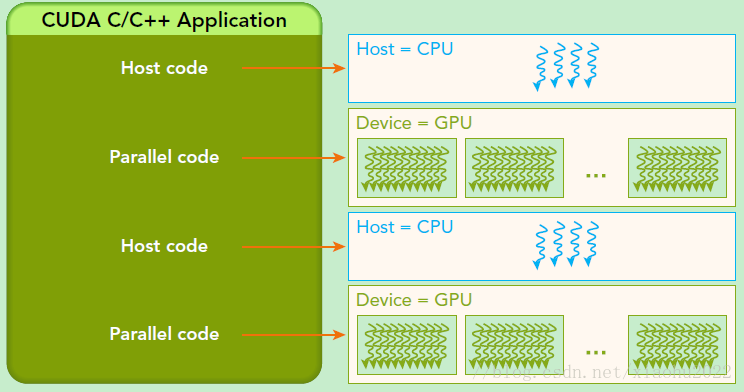
CUDA编程模型基础
- host: CPU,Memory
- device: GPU,Memory
CUDA程序中既包含host程序,又包含device程序,它们分别在CPU和GPU上运行。同时,host与device之间可以进行通信,这样它们之间可以进行数据拷贝。典型的CUDA程序的执行流程如下:
- 分配host内存,并进行数据初始化;
- 分配device内存,并从host将数据拷贝到device上;
- 调用CUDA的核函数(kernel function)在device上完成指定的运算;
- 将device上的运算结果拷贝到host上;
- 释放device和host上分配的内存。
kernel
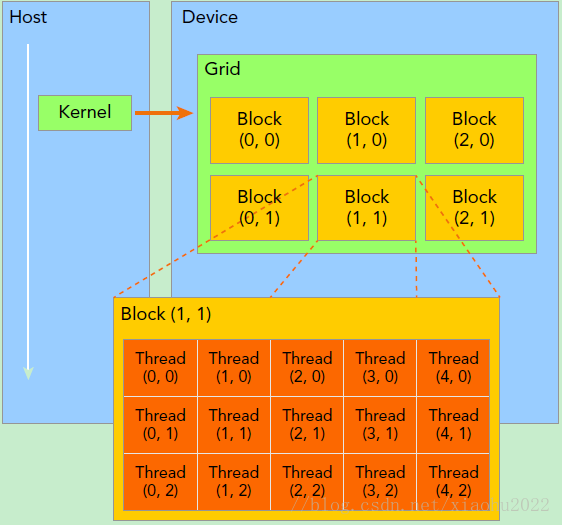
kernel是CUDA中一个重要的概念,kernel是在device上线程中并行执行的函数,核函数用__global__符号声明,在调用时需要用<<<grid, block>>>来指定kernel要执行的线程数量,在CUDA中,每一个线程都要执行核函数,并且每个线程会分配一个唯一的线程号thread ID,这个ID值可以通过核函数的内置变量threadIdx来获得。
由于GPU实际上是异构模型,所以需要区分host和device上的代码,在CUDA中是通过函数类型限定词开区别host和device上的函数,主要的三个函数类型限定词如下:
__global__:在device上执行,从host中调用(一些特定的GPU也可以从device上调用),返回类型必须是void,不支持可变参数,不能成为类成员函数。注意用__global__定义的kernel是异步的,这意味着host不会等待kernel执行完就执行下一步。__device__:在device上执行,单仅可以从device中调用,不可以和__global__同时用。__host__:在host上执行,仅可以从host上调用,一般省略不写,不可以和__global__同时用,但可和__device__同时用,此时函数会在device和host都编译。
grid/block/thread
dim3 grid(3, 2);
dim3 block(5, 3);
kernel_fun<<< grid, block >>>(prams...);
The key is in CUDA’s
<<<1, 1>>>syntax. This is called the execution configuration, and it tells the CUDA runtime how many parallel threads to use for the launch on the GPU.
builtin variables
- threadIdx
- blockIdx
- blockDim
- gridDim
对于一个2-dim的block(Dx,Dy),线程(x,y)的ID值为(x+y∗Dx),
如果是3-dim的block(Dx,Dy,Dz),线程(x,y,z)的ID值为(x+y∗Dx+z∗Dx∗Dy)。
matrix add
# kernel function
__global__ void MatAdd(float A[N][N], float B[N][N], float C[N][N])
{
int col = blockIdx.x * blockDim.x + threadIdx.x;
int row = blockIdx.y * blockDim.y + threadIdx.y;
if (col < N && row < N)
C[row][col] = A[row][col] + B[row][col];
}
int main()
{
...
// Kernel config
dim3 threadsPerBlock(16, 16);
dim3 numBlocks(N / threadsPerBlock.x, N / threadsPerBlock.y);
// kernel call
MatAdd<<<numBlocks, threadsPerBlock>>>(A, B, C);
...
}
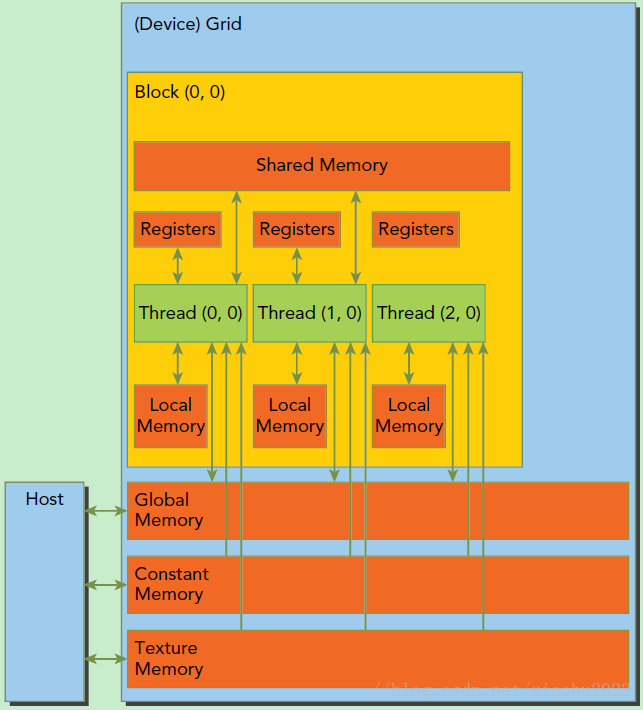
CUDA内存模型
gpu memory
logical/physical layer
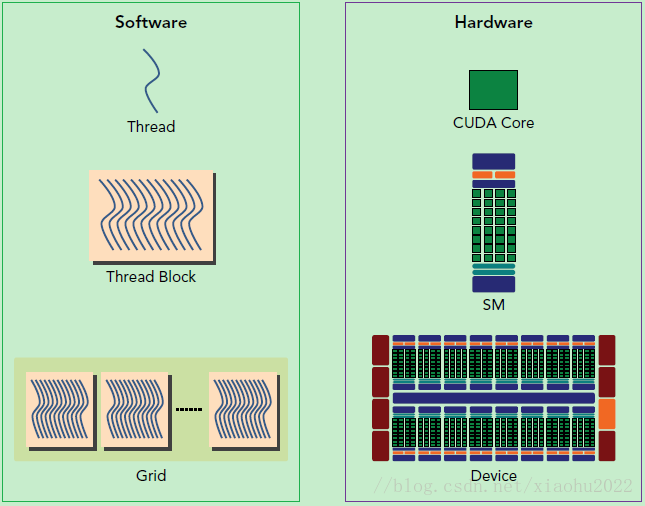
SP最基本的处理单元,Streaming Processor,也称为CUDA core。SM是英文名是Streaming Multiprocessor,翻译过来就是流式多处理器。- 一个kernel的各个线程块有可能被分配多个
SM,所以grid只是逻辑层,而SM才是执行的物理层。SM采用的是SIMT(Single-Instruction, Multiple-Thread,单指令多线程)架构,基本的执行单元是线程束(wraps),线程束包含32个线程,这些线程同时执行相同的指令,但是每个线程都包含自己的指令地址计数器和寄存器状态,也有自己独立的执行路径。 - 由于
SM的基本执行单元是包含32个线程的线程束,所以block大小一般要设置为32的倍数。
- 每个thread由每个SP执行
- 每个thread block由SM执行
- 一个kernel其实由一个grid来执行,一个kernel一次只能在一个GPU上执行
Code
see cuda-demo
CMakeLists.txt
cmake_minimum_required (VERSION 2.8.7)
project (CudaExample)
enable_language(C)
enable_language(CXX)
set(CMAKE_CXX_STANDARD 11)
# Set the output folder where your program will be created
set(CMAKE_BINARY_DIR ${CMAKE_SOURCE_DIR}/bin)
set(EXECUTABLE_OUTPUT_PATH ${CMAKE_BINARY_DIR})
set(LIBRARY_OUTPUT_PATH ${CMAKE_BINARY_DIR})
find_package(CUDA REQUIRED) # user-defined
MESSAGE( [Main] " CUDA_LIBRARIES = ${CUDA_LIBRARIES}")
MESSAGE( [Main] " CUDA_INCLUDE_DIRS = ${CUDA_INCLUDE_DIRS}")
# The following folder will be included
include_directories(
${CUDA_INCLUDE_DIRS}
)
set(CUDA_NVCC_FLAGS "-g -G")
set(GENCODE -gencode=arch=compute_61,code=sm_61)
cuda_add_executable(demo src/demo.cu OPTIONS ${GENCODE})
target_link_libraries(demo ${CUDA_LIBRARIES})
#cuda_add_library(gpu SHARED ${CURRENT_HEADERS} ${CURRENT_SOURCES})
#cuda_add_library(gpu STATIC ${CURRENT_HEADERS} ${CURRENT_SOURCES})
vector add
#include <stdlib.h>
#include <iostream>
#include <cuda_runtime.h>
using namespace std;
/*
https://blog.csdn.net/fb_help/article/details/79330815
foo.cuh + foo.cu
*/
// function to add the elements of two arrays
void add(int n, float *a, float *b, float *c)
{
for (int i = 0; i < n; i++)
c[i] = a[i] + b[i];
}
__global__ void kernel_add(int n, float *a, float *b, float *c)
{
// thread id
int i = blockDim.x * blockIdx.x + threadIdx.x;
c[i] = a[i] + b[i];
}
__global__ void kernel_add2(int n, float *a, float *b, float *c)
{
// thread id
int index = blockDim.x * blockIdx.x + threadIdx.x;
// grid-stride loop
int grid_stride = blockDim.x * gridDim.x; // 256*4096
// in this case; only 1 loop
for (int i = index; i < n; i += grid_stride)
{
c[i] = a[i] + b[i];
}
}
void device_info()
{
int deviceCount;
cudaGetDeviceCount(&deviceCount);
for (int i = 0;i<deviceCount;i++)
{
cudaDeviceProp devProp;
cudaGetDeviceProperties(&devProp, i);
std::cout << "使用GPU device " << i << ": " << devProp.name << std::endl;
std::cout << "设备全局内存总量: " << devProp.totalGlobalMem / 1024 / 1024 << "MB" << std::endl;
std::cout << "SM的数量:" << devProp.multiProcessorCount << std::endl;
std::cout << "每个SM的最大线程数:" << devProp.maxThreadsPerMultiProcessor << std::endl;
std::cout << "每个SM的最大线程束数(warps):" << devProp.maxThreadsPerMultiProcessor / 32 << std::endl;
std::cout << "每个线程块(Block)的共享内存大小:" << devProp.sharedMemPerBlock / 1024.0 << " KB" << std::endl;
std::cout << "每个线程块(Block)的最大线程数:" << devProp.maxThreadsPerBlock << std::endl;
std::cout << "每个线程块(Block)可用的32位寄存器数量: " << devProp.regsPerBlock << std::endl;
std::cout << "======================================================" << std::endl;
}
}
void test_cpu()
{
float *A, *B, *C;
int n = 1024 * 1024;
int size = n * sizeof(float);
// CPU端分配内存
A = (float*)malloc(size);
B = (float*)malloc(size);
C = (float*)malloc(size);
// 初始化数组
for (int i = 0;i<n;i++)
{
A[i] = 90.0;
B[i] = 10.0;
}
// Run kernel on 1M elements on the CPU
add(n, A, B, C);
// 校验误差
float max_error = 0.0;
for (int i = 0;i<n;i++)
{
max_error += fabs(100.0 - C[i]);
}
cout << "max error is " << max_error << endl;
// 释放CPU端的内存
free(A);
free(B);
free(C);
}
/*
cudaMalloc+cudaMemcpy+cudaFree
*/
int test_gpu_1()
{
float*A, *Ad, *B, *Bd, *C, *Cd;
int n = 1024 * 1024;
int size = n * sizeof(float);
// CPU端分配内存
A = (float*)malloc(size);
B = (float*)malloc(size);
C = (float*)malloc(size);
// 初始化数组
for(int i=0;i<n;i++)
{
A[i] = 90.0;
B[i] = 10.0;
}
// GPU端分配内存
cudaMalloc((void**)&Ad, size);
cudaMalloc((void**)&Bd, size);
cudaMalloc((void**)&Cd, size);
// CPU的数据拷贝到GPU端
cudaMemcpy(Ad, A, size, cudaMemcpyHostToDevice);
cudaMemcpy(Bd, B, size, cudaMemcpyHostToDevice);
cudaMemcpy(Bd, B, size, cudaMemcpyHostToDevice);
// 1-dim
// 定义kernel执行配置,(1024*1024/512)个block,每个block里面有512个线程
int block_size = 512;
int num_of_blocks = (n + block_size - 1) / block_size;
dim3 dimBlock(block_size);
dim3 dimGrid(num_of_blocks);
// 执行kernel
kernel_add<<<dimGrid, dimBlock>>>(n, Ad, Bd, Cd);
// 将在GPU端计算好的结果拷贝回CPU端
cudaMemcpy(C, Cd, size, cudaMemcpyDeviceToHost);
// 校验误差
float max_error = 0.0;
for(int i=0;i<n;i++)
{
max_error += fabs(100.0 - C[i]);
}
cout << "max error is " << max_error << endl;
// 释放CPU端、GPU端的内存
free(A);
free(B);
free(C);
cudaFree(Ad);
cudaFree(Bd);
cudaFree(Cd);
return 0;
}
/*
cudaMallocManaged+cudaDeviceSynchronize+cudaFree
*/
void test_gpu_2()
{
float*A, *B, *C;
int n = 1024 * 1024;
int size = n * sizeof(float);
// Allocate Unified Memory – accessible from CPU or GPU
cudaMallocManaged((void**)&A, size);
cudaMallocManaged((void**)&B, size);
cudaMallocManaged((void**)&C, size);
// 初始化数组
for (int i = 0;i<n;i++)
{
A[i] = 90.0;
B[i] = 10.0;
}
// 1-dim
// 定义kernel执行配置,(1024*1024/512)个block,每个block里面有512个线程
int block_size = 512;
int num_of_blocks = (n + block_size - 1) / block_size;
dim3 dimBlock(block_size);
dim3 dimGrid(num_of_blocks);
// 执行kernel
kernel_add2 << <dimGrid, dimBlock >> >(n, A, B, C);
// Wait for GPU to finish before accessing on host
cudaDeviceSynchronize(); // block until the GPU has finished all tasks
// 校验误差
float max_error = 0.0;
for (int i = 0;i<n;i++)
{
max_error += fabs(100.0 - C[i]);
}
cout << "max error is " << max_error << endl;
// Free Unified Memory
cudaFree(A);
cudaFree(B);
cudaFree(C);
}
int main()
{
device_info();
test_cpu();
test_gpu_1();
test_gpu_2();
return 0;
}
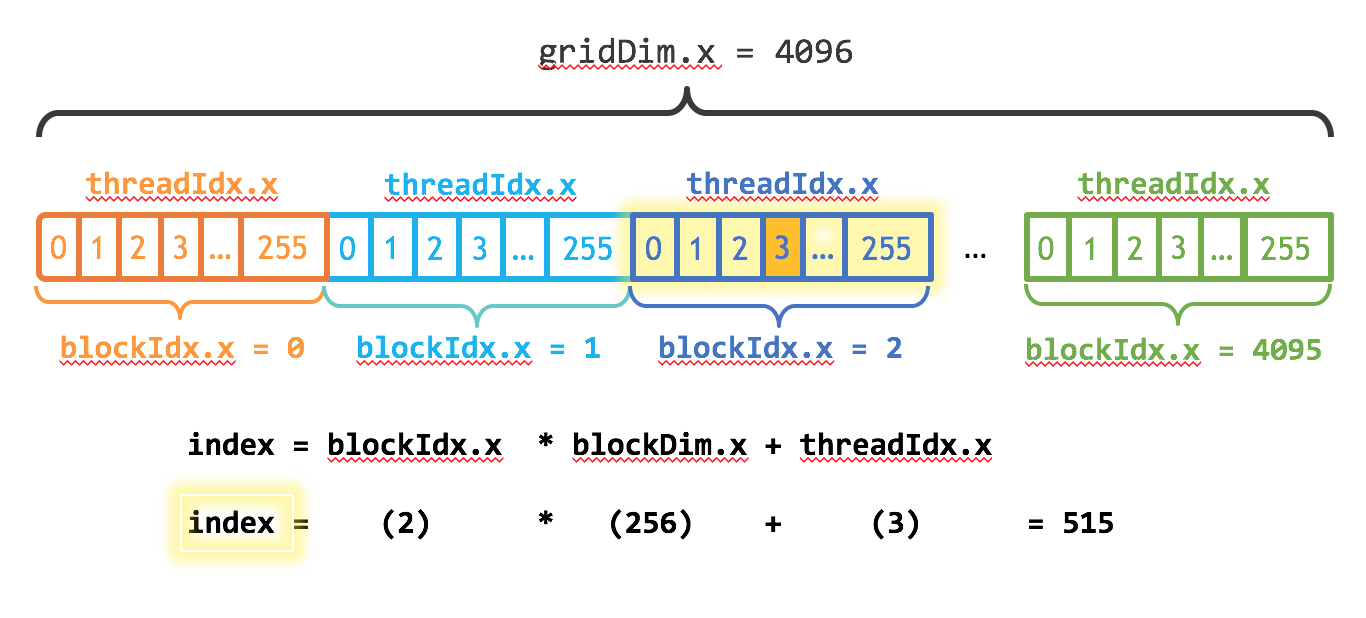
notes for block_size and num_of_blocks
int block_size = 512;
int num_of_blocks = (n + block_size - 1) / block_size; // 4096
dim3 dimBlock(block_size);
dim3 dimGrid(num_of_blocks);
notes for grid-stride loop
__global__ void kernel_add2(int n, float *a, float *b, float *c)
{
// thread id
int index = blockDim.x * blockIdx.x + threadIdx.x;
// grid-stride loop
int grid_stride = blockDim.x * gridDim.x; // 256*4096
// in this case; only 1 loop
for (int i = index; i < n; i += grid_stride)
{
c[i] = a[i] + b[i];
}
}
nvprof
nvprof.exe demo.exe
==8748== Profiling application: .\demo.exe
==8748== Profiling result:
Time(%) Time Calls Avg Min Max Name
43.63% 1.6413ms 3 547.10us 517.71us 591.41us [CUDA memcpy HtoD]
30.11% 1.1327ms 1 1.1327ms 1.1327ms 1.1327ms [CUDA memcpy DtoH]
26.26% 987.80us 2 493.90us 243.43us 744.37us kernel_add(int, float*, float*, float*)
at
C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v8.0\bin\nvprof.exe
matrix multiply
- for 1-dim vector add, we use 1-dim grid and block
- for 2-dim matrix multiply, we use 2-dim grid and block.
// ========================================
// 2-dim
// ========================================
// 矩阵类型,行优先,M(row, col) = *(M.elements + row * M.width + col)
struct Matrix
{
int width;
int height;
float *elements;
};
// 获取矩阵A的(row, col)元素
__device__ float getElement(Matrix *A, int row, int col)
{
return A->elements[row * A->width + col];
}
// 为矩阵A的(row, col)元素赋值
__device__ void setElement(Matrix *A, int row, int col, float value)
{
A->elements[row * A->width + col] = value;
}
// 矩阵相乘kernel,2-D,每个线程计算一个元素
__global__ void matMulKernel(Matrix *A, Matrix *B, Matrix *C)
{
float sum = 0.0;
int row = threadIdx.y + blockIdx.y * blockDim.y;
int col = threadIdx.x + blockIdx.x * blockDim.x;
for (int i = 0; i < A->width; ++i)
{
sum += getElement(A, row, i) * getElement(B, i, col);
}
setElement(C, row, col, sum);
}
void test_gpu_3()
{
int width = 1 << 8;
int height = 1 << 8;
Matrix *A, *B, *C;
// 申请托管内存
cudaMallocManaged((void**)&A, sizeof(Matrix));
cudaMallocManaged((void**)&B, sizeof(Matrix));
cudaMallocManaged((void**)&C, sizeof(Matrix));
int nBytes = width * height * sizeof(float);
cudaMallocManaged((void**)&A->elements, nBytes);
cudaMallocManaged((void**)&B->elements, nBytes);
cudaMallocManaged((void**)&C->elements, nBytes);
// 初始化数据
A->height = height;
A->width = width;
B->height = height;
B->width = width;
C->height = height;
C->width = width;
for (int i = 0; i < width * height; ++i)
{
A->elements[i] = 1.0;
B->elements[i] = 2.0;
}
// 定义kernel的执行配置
dim3 blockSize(32, 32);
dim3 gridSize(
(width + blockSize.x - 1) / blockSize.x,
(height + blockSize.y - 1) / blockSize.y
);
// 执行kernel
matMulKernel<<<gridSize, blockSize>>>(A, B, C);
// 同步device 保证结果能正确访问
cudaDeviceSynchronize();
// 检查执行结果
float maxError = 0.0;
for (int i = 0; i < width * height; ++i)
maxError += fabs(C->elements[i] - 2 * width);
cout << "max error is " << maxError << endl;
// 释放托管内存
cudaFree(A->elements);
cudaFree(B->elements);
cudaFree(C->elements);
cudaFree(A);
cudaFree(B);
cudaFree(C);
}
int main()
{
test_gpu_3();
return 0;
}
notes for
dim3 blockSize(32, 32);
dim3 gridSize(
(width + blockSize.x - 1) / blockSize.x,
(height + blockSize.y - 1) / blockSize.y
);
Reference
History
- 20181121: created.